|
产品介绍
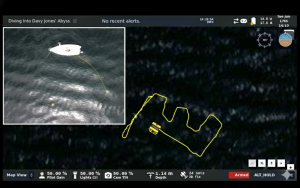
USBL超短基线水下定位MKIII 旗舰性能、零漂移、无限时水下追踪专家 专业级水下定位巅峰之作,为长效深潜任务而生。 ROV Locator Mk III 比MK II更易用!300米专业级潜深,声学同步。免费的 SonarView 软件,即开即用,实时追踪,可通过开放 API 集成至自有软件。 ● 核心优势: |
选型对比表
| ROV Locator Ⅱ | ROV Locator Ⅲ | |
|---|---|---|
| 同步技术 | GNSS 卫星同步 | Acoustic 声学双工同步 |
| 定位原理 | 依靠两端预先对齐的时钟计算时间差 | 依靠水面/水下信号往返飞行时间 |
| 入水前准备 | 必须在水面接收GPS信号 | 无需对时,通电即用 |
| 精度稳定性 | 随时间产生漂移(约1m/小时) | 零漂移,精度始终恒定 |
| 持续作业 | 需定期收回至水面重新同步 | 可无限期留在水下工作 |
| 系统集成度 | 较高,需确保两端GNSS天线外露 | 极高,安装更简便且体积更精悍 |
| 多设备兼容性 | 限制较少 | 同一区域仅限一套系统工作 |
| 适用场景 | 短时间,低预算的常规任务 | 长时间深海作业,专业科学考察 |
Cerulean Sonar MK Ⅲ USBL 水下定位系统参数表
| 参数类别 | 参数项(Parameter) | 水面单元(Transceiver/Surface) | 水下单元(Transponder/Subsea) |
|---|---|---|---|
| 物理规格 | 耐压深度(Depth Rating) | 50 m | 300 m |
| 体积(Volume) | 480 ml | 250 ml | |
| 空气中质量(Mass in Air) | 600 g | 440 g | |
| 水中质量(Mass in Water) | -120 g | 170 g | |
| 性能指标 | 脉冲频率(Pulse Frequency) | 25 kHz | 25 kHz |
| 方位角分辨率(Yaw/Azimuth Res.) | 0.1° | — | |
| 仰角分辨率(Elevation Res.) | 0.1° | — | |
| 斜距测量分辨率(Slant Range Res.) | 0.1 m | — | |
| 电气参数 | 输入电压(Input Voltage) | 5 V-28 V | 10 V-28 V |
| 安装配置 | 包含附件(Included Hardware) | 安装夹具、抱箍 | 安装夹具、抱箍 |
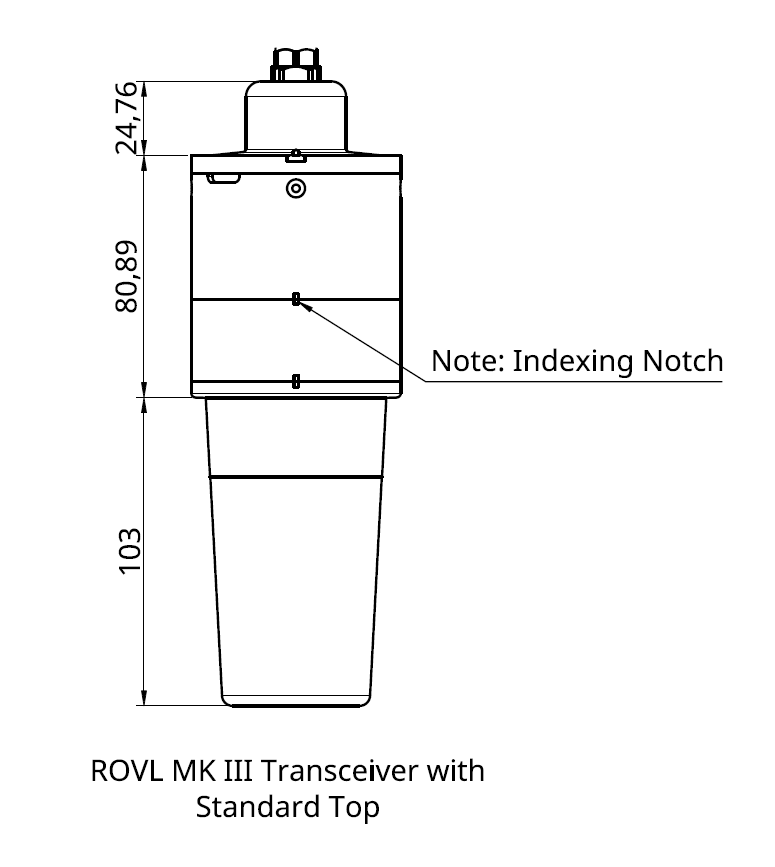
尺寸.png)