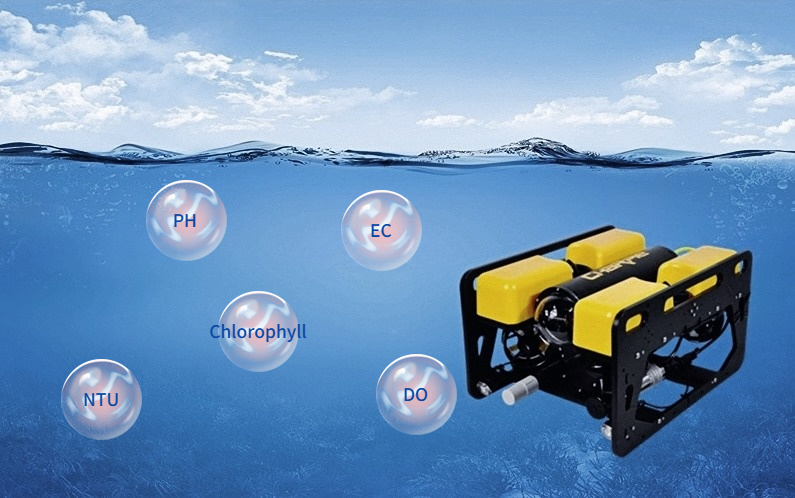
The underwater ROV is equipped with water quality sensors for temperature, PH value, dissolved oxygen, ammonia nitrogen, and more, which can accurately reveal the physical, chemical and biological status of the water. These data is transmitted back onto the ground control station simultaneously for technicians to assess and take measures. It is widely used in environmental protection and oil spill detections.
ROV Deploy & Application:
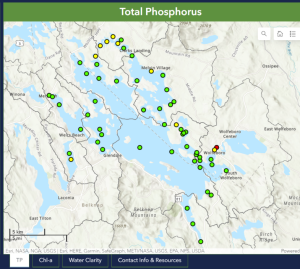
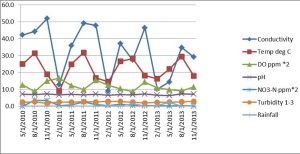
Routine Water Quality Monitoring
(1) Equip the ROV with multi-parameter water quality sensors: temperature, PH value, dissolved oxygen, ammonia nitrogen, total phosphorus, total nitrogen, residual chlorine, conductivity, chlorophyll and so on.
(2) Release the underwater ROV to dive to the required monitoring points.
(3) Data collection: dive to a specified depth, apply Depth Hold on the ROV till it collects stable and accurate water quality data.
(4) Water sampling: dive again to a specified depth above the riverbed and take samples.
For Oil Leak Detection
Carpeting the designated area with an oil carrier in the water and analyze on the oil leakage points based on the collected data.


ROV Video footage from sunken oil tanker from 108m below the exploded spot.
Recommended Products: Portable ROV (Battery Powered for cost-effective purchase, 220vac Surface Powered ROV for Long Time Operations