|
产品介绍
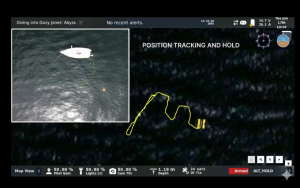
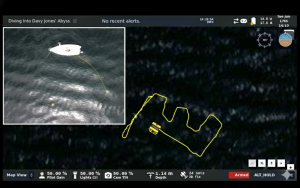
USBL超短基线水下定位MKII 超短基线水下定位 实时坐标跟踪 ROV Locator Mk II 是一款专为小型 ROV 开发的便携式定位系统,500米探测距离。系统包含1*发射端(ROV安装),1*水面接收端组成。通过极简的部署流程,操作员在地面站地图界面上实时掌握ROV的动态坐标。 ● 核心优势: |


 |
 |
选型对比表
| ROV Locator Ⅱ | ROV Locator Ⅲ | |
|---|---|---|
| 同步技术 | GNSS 卫星同步 | Acoustic 声学双工同步 |
| 定位原理 | 依靠两端预先对齐的时钟计算时间差 | 依靠水面/水下信号往返飞行时间 |
| 入水前准备 | 必须在水面接收GPS信号 | 无需对时,通电即用 |
| 精度稳定性 | 随时间产生漂移(约1m/小时) | 零漂移,精度始终恒定 |
| 持续作业 | 需定期收回至水面重新同步 | 可无限期留在水下工作 |
| 系统集成度 | 较高,需确保两端GNSS天线外露 | 极高,安装更简便且体积更精悍 |
| 多设备兼容性 | 限制较少 | 同一区域仅限一套系统工作 |
| 适用场景 | 短时间,低预算的常规任务 | 长时间深海作业,专业科学考察 |