水下机器人超远程通讯技术
水下机器人超远程光纤通讯 能否实现20km、同时保持大带宽与双向实时通讯?本文说明其技术要点,分享查湃在管道巡检、深海重作业等场景的超远程通讯实战经验。
一、 水下机器人如何通讯?
由于水中不通电磁波,缆控水下机器人(ROV)一般采用有线通讯,自治水下机器人(AUV)一般采用声波通讯。有线通讯带宽高,可以实现多路高清视频、控制信号和传感器信号的实时传输,然而它的缺点在于通讯距离受电缆长度的限制。尽管如此,由于有线通讯设备成本低,技术成熟,在商业应用中被广泛使用。另一方面,声波通讯因带宽受限,只能用于关键控制信号和报警信息的传输,机器人在复杂水下空间的控制和导航都必须依靠智能算法。同时水声通迅设备成本极高,只在科考和特殊用途中使用。
二、 水下机器人通讯距离多长?
商用水下机器人一般是依靠脐带缆实现双向实时通讯。一些低成本的水下机器人多采用电力载波技术(PLC)实现高清视频和控制信号的传输,一般有效工作距离为300-500米,传输带宽在100-200M。PLC通讯基于双绞线,接线简单。远距离传输则必须要采用光纤通讯,可以实现多路高清视频、控制信号和传感器的实施双向通讯,通讯距离可以达到5km,大功率光端机可以达到20km。对于一些大型的水下机器人,由于搭载光学设备、传感器、设备多,为增加通讯带宽,需要采用波分复用技术(WDM),即在同一条光纤上基于不同波长的光实现更多数据的传输。
三、 避坑:传输距离 = 缆控机器人的工作半径吗?
实际应用中,通讯介质(双绞线或光纤)在途中会经过多次转接,转接次数和每个连接点的损耗都会影响传输距离。另外,电磁干扰、散热都会对通讯距离产生很大的影响。所以,通讯设备的标称“通讯距离”不等于机器人的远程通讯距离。另外,还需要考虑到机器人的动力是否能拖动这么长的脐带缆,考虑续航里程是否能达到这么远等等。不同机器人厂家的技术储备不同,要以实测无延时距离为准。
四、 查湃解决方案
查湃的远程通讯技术,在多个重作业型超深海机器人、超长海底管道巡检等项目中得到实际验证。
应用场景1 :超长海底管道巡检
超长海底管道内快速巡检,要求数公里的水平大距离通讯。查湃采用轻型铠装光纤缆通讯,机器人搭载二次锂电池实现长距离续航。2个垂直推进器+1个垂直推进器的mini机架,自由穿梭管道,并且可以实现升降、转弯等功能。该方案实测达到2km+的通讯,最小钻入300mm口径的管道,并且实现一台高清摄像头、1台轮廓声纳的搭载和实时数据通讯。

应用场景2:重作业型水下机器人
针对超深海的重作业型水下机器人的实际需求,查湃采用波分复用技术实现大量光学、声学传感器、设备的实时通讯问题。深海光纤的耐压密封、从机器人本体经过脐带缆、绞车、甲板缆,最后进入控制集装箱的光端接口箱全链路设计。关于超深海光纤脐带缆自身的结构强度(耐压、耐拉力)和铠装层导致脐带缆过硬影响机器人运动等对策。为不同的深海作业系统提供标准化可靠远程通讯解决方案。

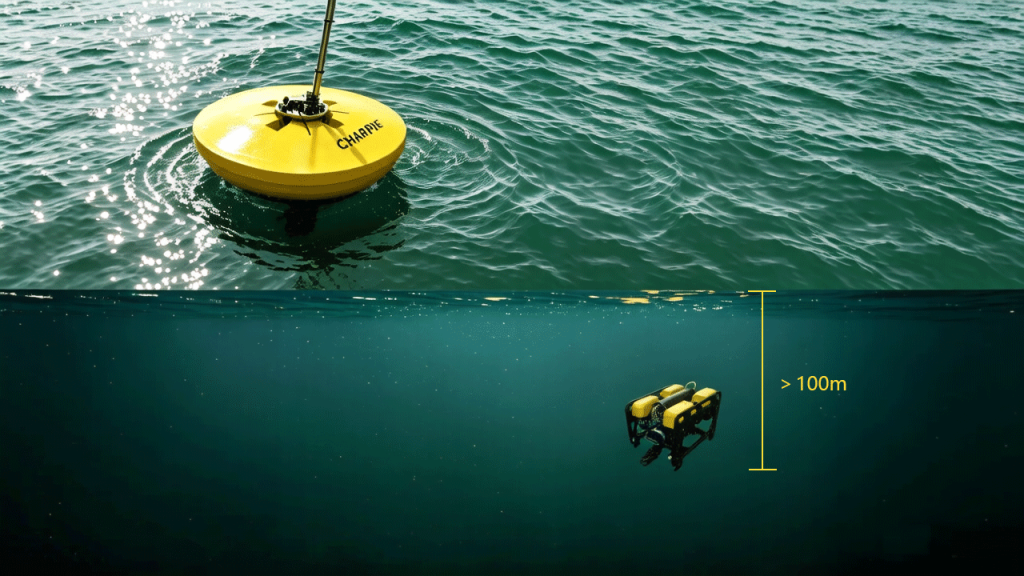
应用场景3:中小型缆控机器人+浮标
查湃的“中小型缆控机器人+浮标”解决方案,已经被不同领域的客户验证,由于其可以实现低成本的远程或深海观测,成为新的方向。机器人与浮标采用有线通讯,而浮标到岸基控制单元采用无线通讯,兼顾了有缆的实时通讯,同时摆脱了机器人与控制基站的长缆束缚。布放、回收方便,革命性的降低了成本、提升了观测距离。